今日は大改造。
 間延び感はだいぶ抑えられたかな。
間延び感はだいぶ抑えられたかな。

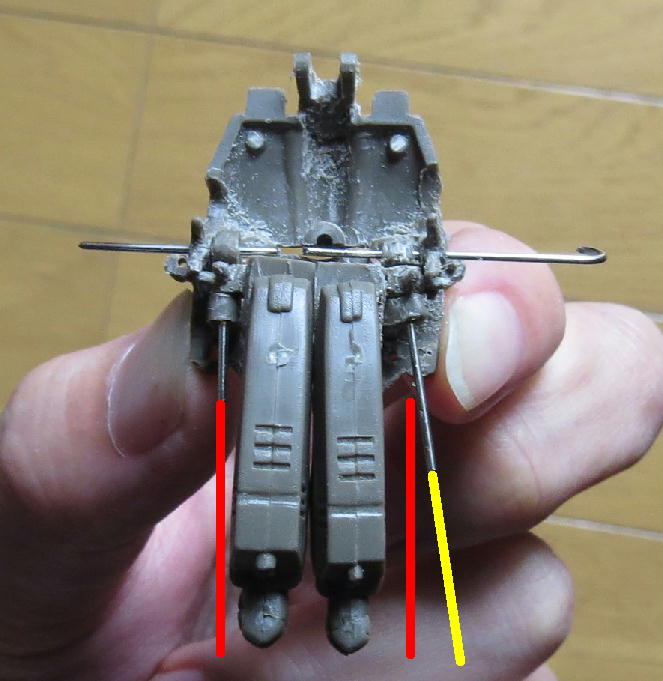
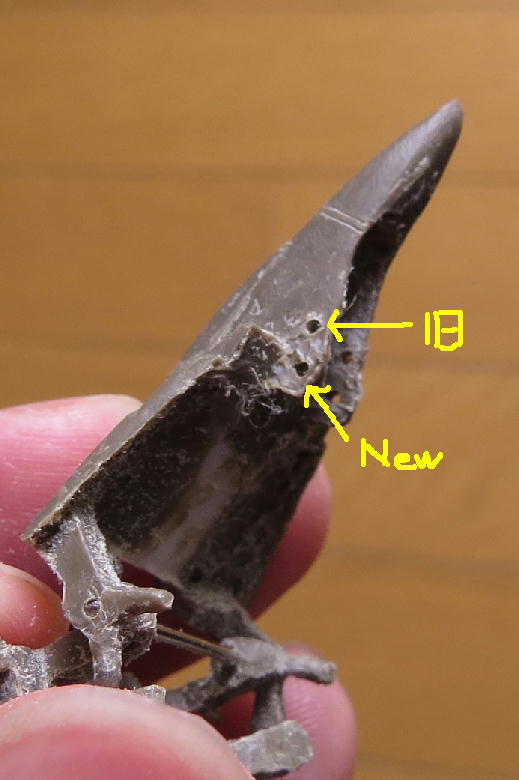
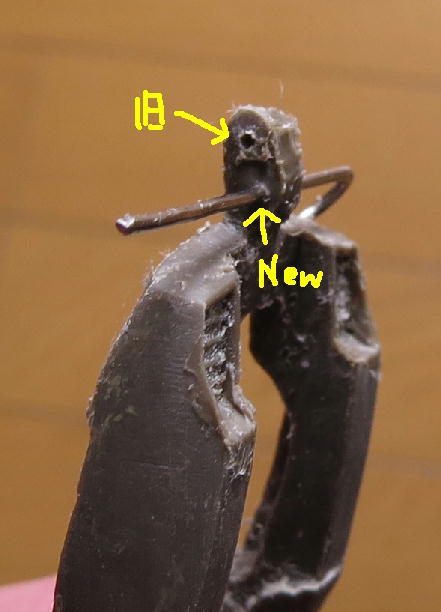
脚部と胴体をつなぐジョイントの接合位置を変更します。
プロポーションにも手を入れてかっこよくしなきゃ( ・`ω・´)
これでバトロイド形態の時に脚が今までより上に来ます。
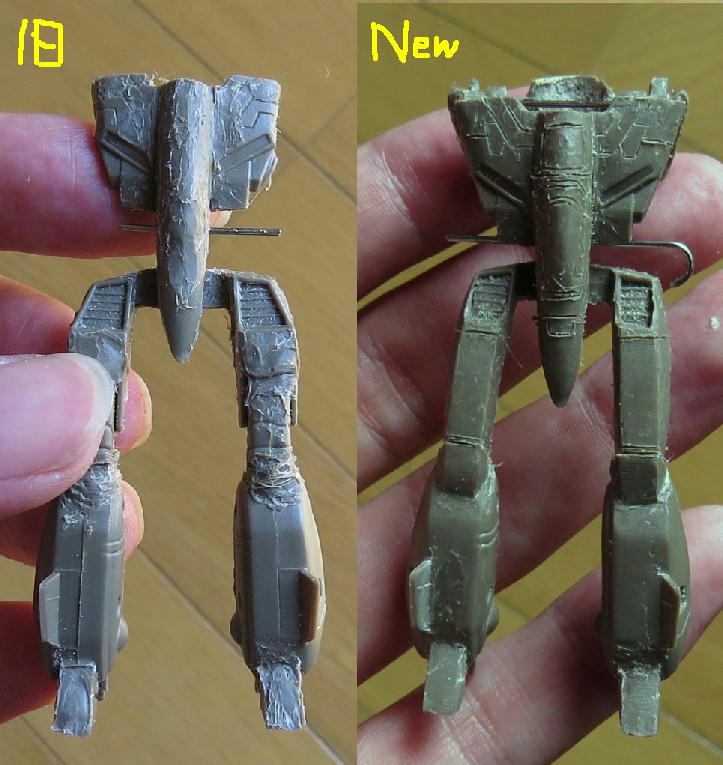
こんなです。
こうしてみると他にも結構いじっているのがわかりますね。
いつの間にか胸部がこんなにも広がっていたとは(・。・)
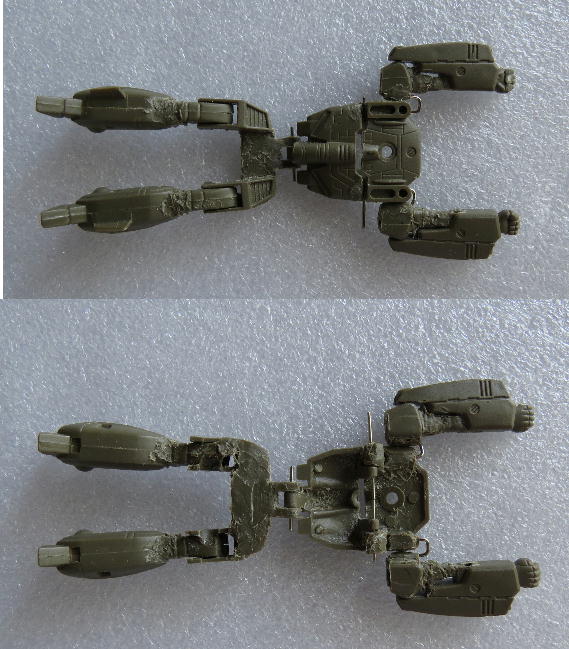
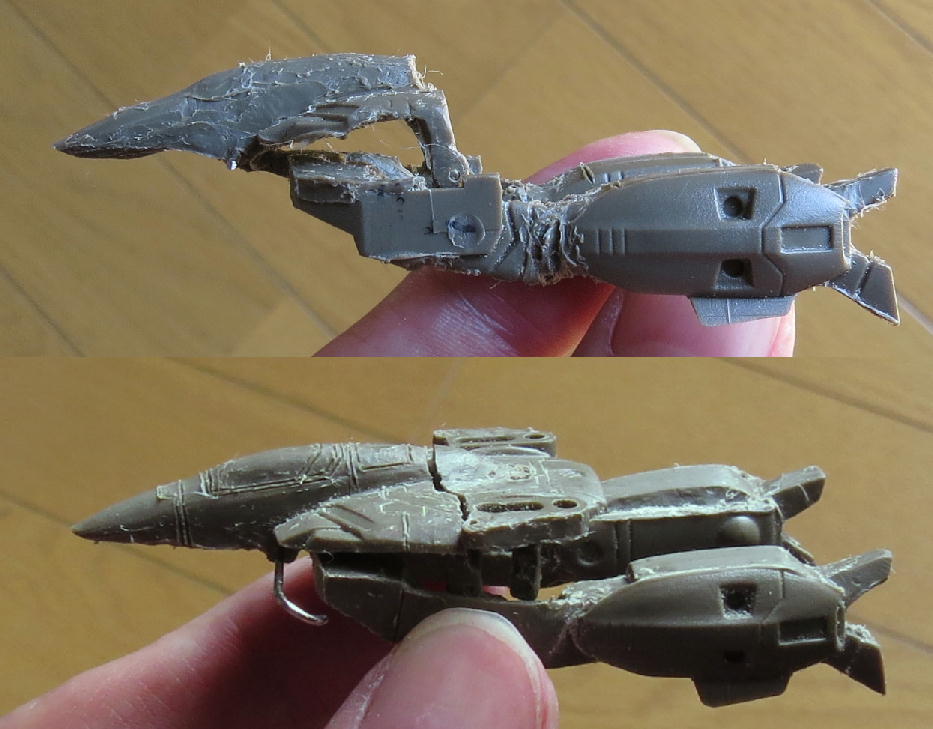
ファイターにするとこんな。
多少ずんぐりむっくり感はあるものの、これはこれで力強い感じがします。
足首のノズルはもうちょっと閉じてもよいかな?
ここは固定式で行くので、ロボットの足であり、飛行機のノズルにも見えるちょうどよい開き具合にしたいものです。
これでも元キットより閉じてはいるんですけどね。
おまけ
どこからみてもあの人ですねw